





Энкодер Keyes KY-040
Общая информация
Модуль энкодера Keyes KY-040
Механический датчик, преобразует угол поворота в электрические сигналы. Говоря простым языком — вал в данном датчике можно крутить в любом направлении (по часовой и против часовой стрелки) любое колич... Перейти к полному описанию
3 руб.
Артикул: 23869542
есть в наличии (99)
Общая информация
Модуль энкодера Keyes KY-040
Механический датчик, преобразует угол поворота в электрические сигналы. Говоря простым языком — вал в данном датчике можно крутить в любом направлении (по часовой и против часовой стрелки) любое количество раз. Данное свойство широко используется в различной электронике для наиболее точной ручной настройки различных параметров. Также данный модуль оснащен кнопкой, которая расположена под валом и активируется нажатием на него.
У датчика 5 выходов: электрические импульсы от вращения появляются на ногах CLK и DT, за кнопку отвечает выход SW, а на + и на GND подается питание (5V) и земля соответственно.
Принцип определения направления вращения следующий: при изменении сигнала CLK с высокого уровня (HIGH) на низкий (LOW), считывается состояние сигнала DT. Значение этого сигнала даст нам информацию по направлению движения.
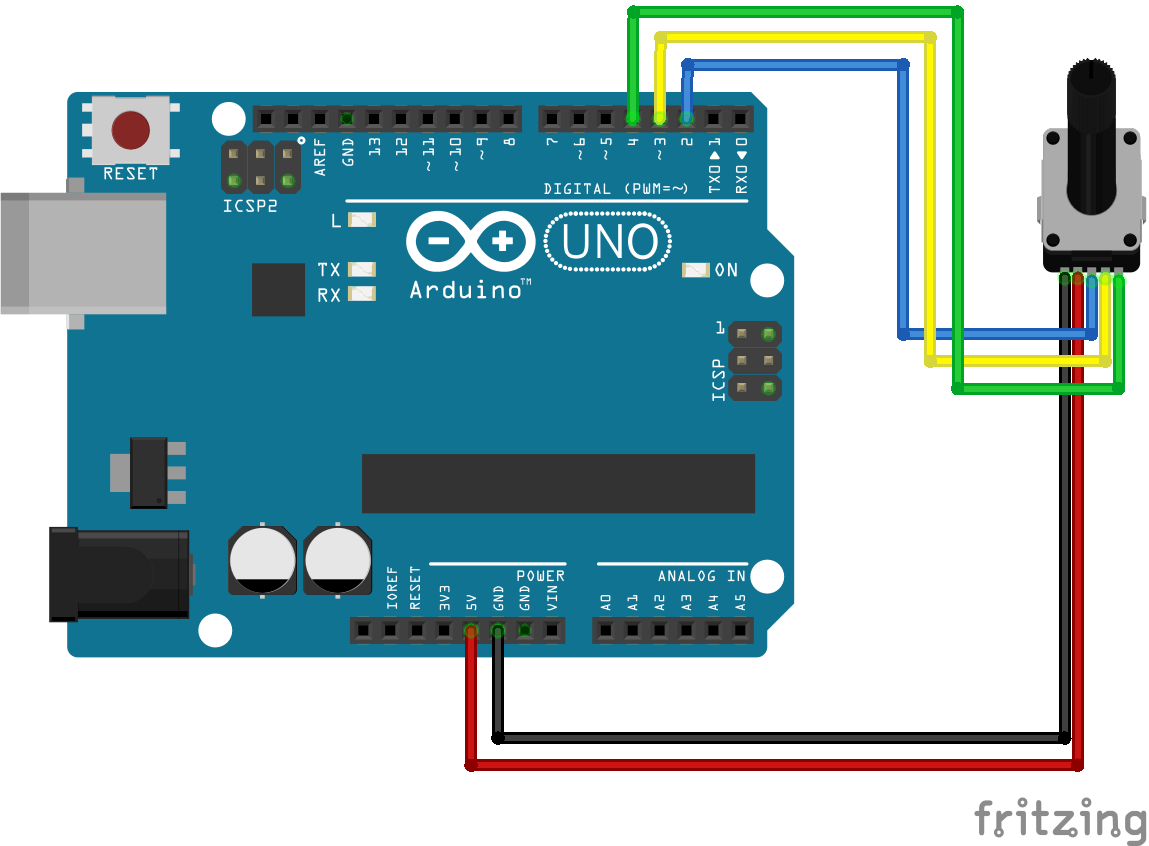
Способ подключения
Рассмотрим пример подключения модуля к плате Arduino UNO. По аналогии можно подключить модуль и к другим платам.
- + с датчика подключим к +5V от Arduino
- GND к GND
- SW ко 2 выходу UNO
- DT к 3 выходу UNO
- CLK к 4 выходу
Пример скетча
int pinDT = 3;
int pinCLK = 4;
int pinSW = 2;
// переменные для хранения текущего и предыдущего состояния CLK
int CLKCurrent, CLKLast;
int DTCurrent;
int SWCurrent;
void setup()
{
Serial.begin(9600);
pinMode(pinDT, INPUT);
pinMode(pinCLK, INPUT);
pinMode(pinSW, INPUT);
}
void loop()
{
CLKCurrent = digitalRead(pinCLK);
DTCurrent = digitalRead(pinDT);
//Serial.println(CLKCurrent);
// произошло вращение
if (CLKCurrent != CLKLast) {
// чтобы узнать направления вращения, будем считывать значение DT
if (DTCurrent == CLKCurrent) {
// на пине DT HIGH, значит вращение произошло по часовой стрелке (CW)
Serial.println("Rotated clockwise");
} else {
// на пине DT LOW, значит вращение произошло по часовой стрелке (CCW)
Serial.println("Rotated counterclockwise");
}
}
CLKLast = CLKCurrent;
}